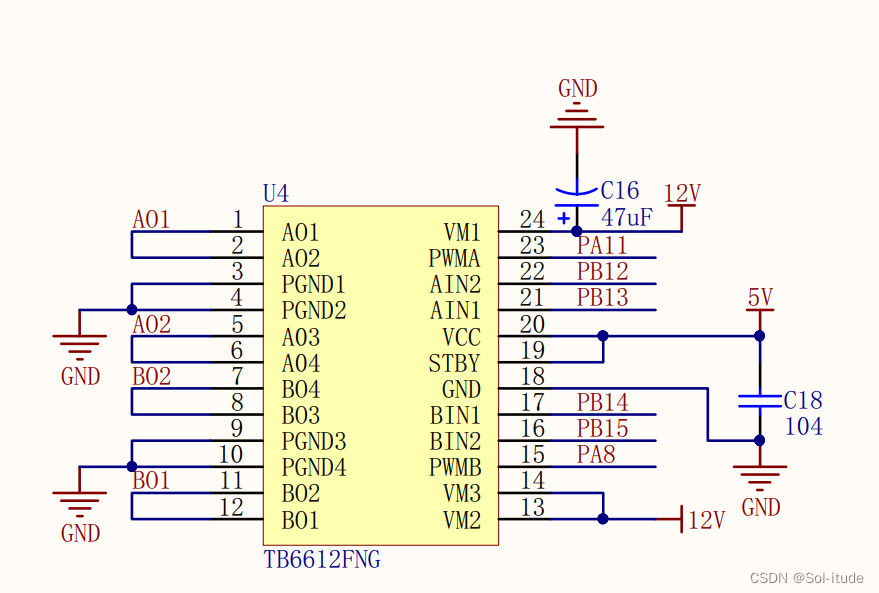
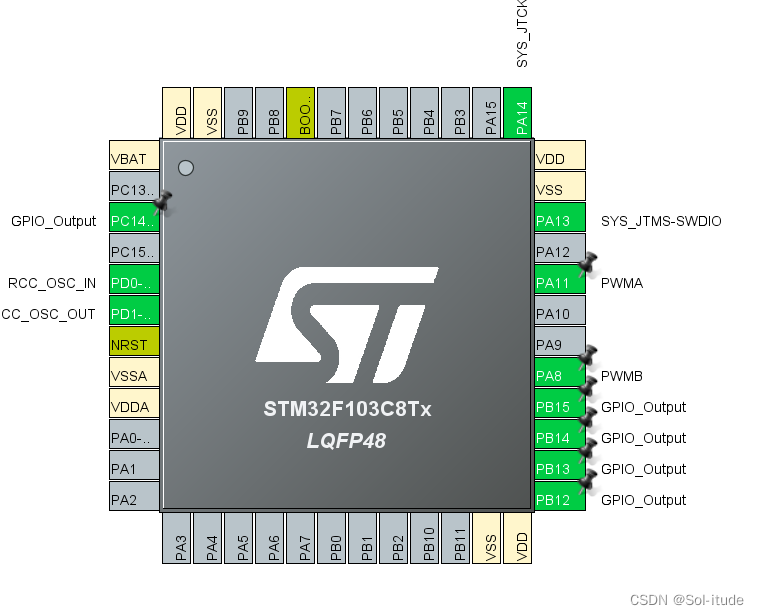
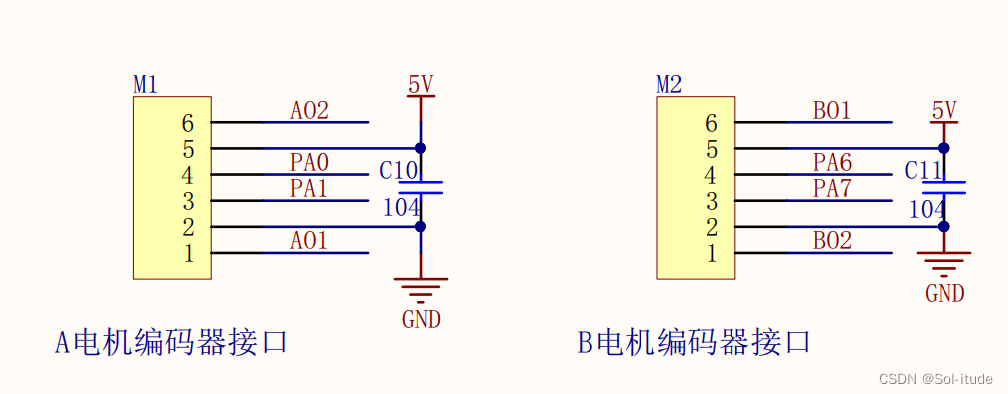
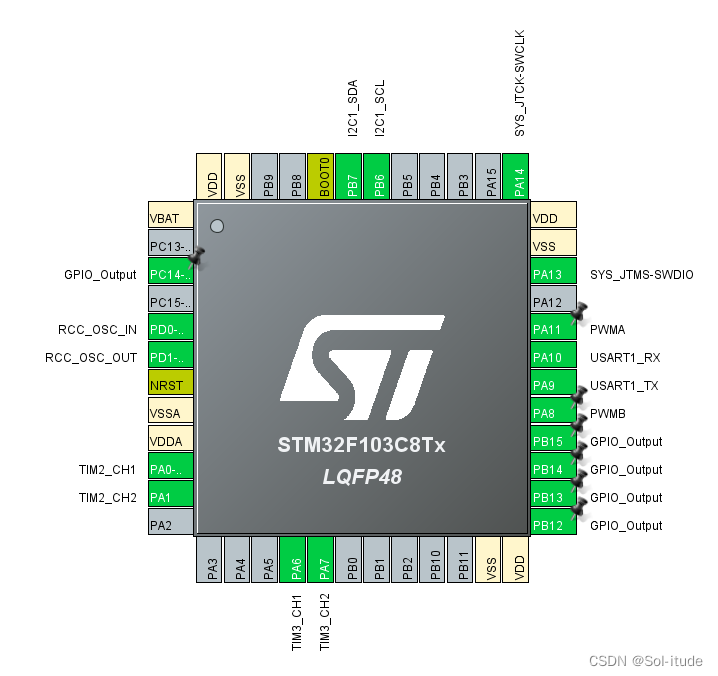
/* USER CODE BEGIN Private defines */ #define AIN2_Pin GPIO_PIN_12 #define AIN2_GPIO_Port GPIOB #define AIN1_Pin GPIO_PIN_13 #define AIN1_GPIO_Port GPIOB
#define BIN2_Pin GPIO_PIN_14 #define BIN2_GPIO_Port GPIOB #define BIN1_Pin GPIO_PIN_15 #define BIN1_GPIO_Port GPIOB /* USER CODE END Private defines */
main.c
1 2 3 4 5 6 7 8
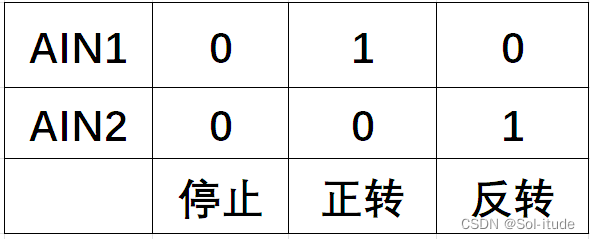
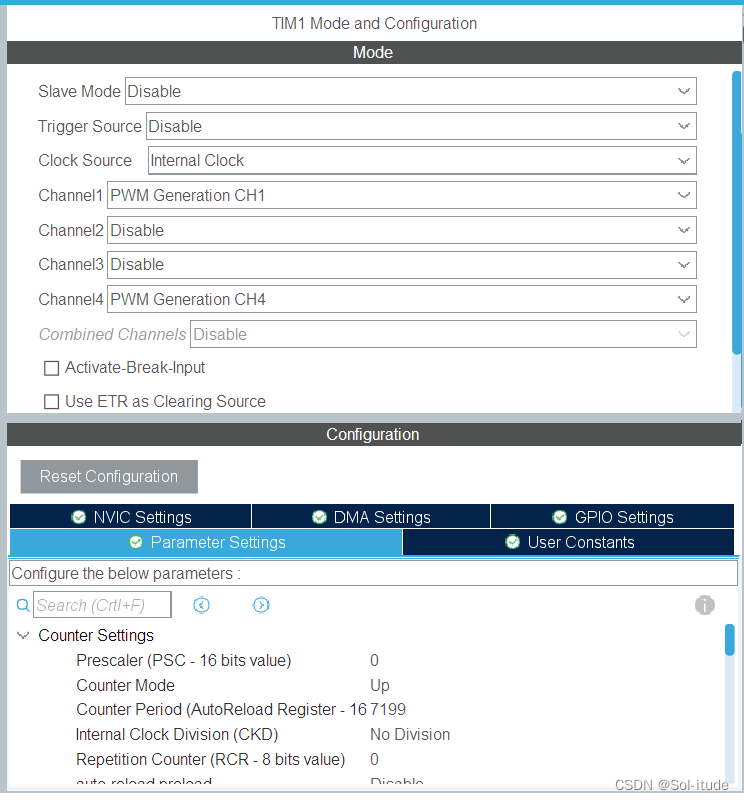
/* USER CODE BEGIN 2 */ HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);//开启TIM1_CH1 HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_4);//开启TIM1_CH4 HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_RESET);//AIN1为0 HAL_GPIO_WritePin(AIN2_GPIO_Port,AIN2_Pin,GPIO_PIN_SET);//AIN2位1,反转 HAL_GPIO_WritePin(BIN1_GPIO_Port,BIN1_Pin,GPIO_PIN_RESET);//BIN1为0 HAL_GPIO_WritePin(BIN2_GPIO_Port,BIN2_Pin,GPIO_PIN_SET);//BIN2位1,反转 /* USER CODE END 2 */
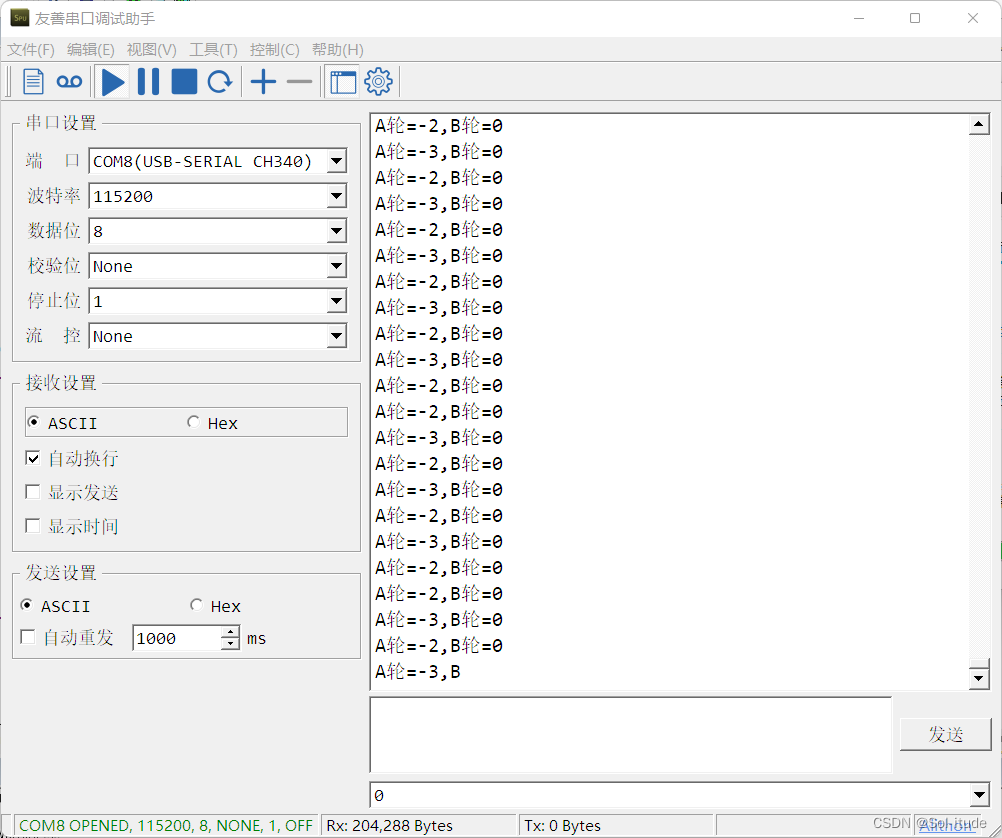
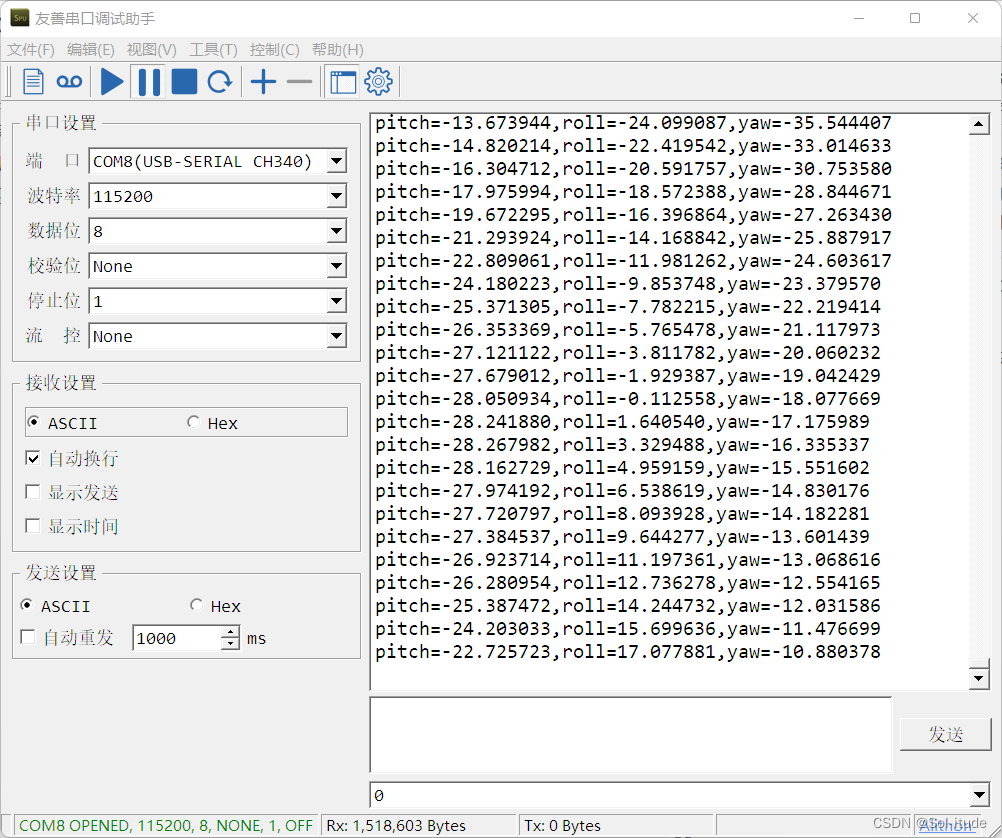
/* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ encoder2=Read_Speed(2); encoder3=Read_Speed(3); printf("A轮=%d,B轮=%d\n",encoder2,encoder3); } }